For making changes in the attitude (or position) of the satellites, considering the level of change and its kind, different actuators can be used.
This actuators, by the use of Action and Reaction Principle (Newton’s second principle), can import force to the satellite without relying on any surface.
One of the most important of such actuators is reaction wheels in which the reaction force made because of rotation’s start, rotation’s speed change, or rotation’s stop can be used as propulsion of attitude’s change.
Due to the country’s need and in order to achieve to the designing and manufacturing technology of such actuators, Space Research Laboratory has begun designing and making samples of such actuators in order to be used in micro level satellites.
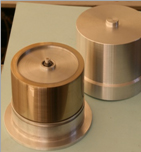
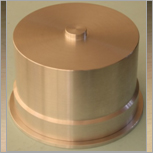
Manufactured models are RW1800, RW1900, RW2000 and RW2100 whose mechanical properties are mentioned in the following table.
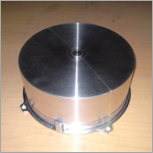
Reaction wheels are made up of different parts including: disc, rotor, stator, installation base, driver and encoder.
The disc is used in order to provide rotator inertia. Rotor and stator are used in order to connect the disc to the driver. Driver’s task is rotating rotor with a definite speed. The encoder measures the rate of rotation speed changes and it also gives feedback to the driver.
It can be used as attitude control actuator on satellites
Different control algorithms can be tested by using it
The possibility of installing and testing on “HAGH 100” & “HOJAT 100” systems
The possibility of controlling and programming of the changes in rotation rate
Smaller dimensions and lower weight in recent samples
| Reaction Wheel (RW 2100) | ||
 |
 |
 |
| Performance | |
| Angular Momentum | 3.8 N.m.s |
| Nominal Rotation Speed | 4000 rpm |
| Max. Rotation Speed | 6000 rpm |
| Nominal Torque | 0.40 N.m |
| Mechanical | |
| Disk Mass | 2 kg |
| Dimension | Ф160*47.6mm |
| Moment of Inertia | 0.0009kgm² |
| Mechanical Power | 85 W |
| Electrical | |
| Voltage | 18-24V |
| Type of plug | Micro-D 15 Female |
| Data Interfaces | RS 485 with ASCII or Binary Protocol |
| Power Consumption | |
| Stand By | 1.1W |
| Max Torque | 100W |
| General | |
| Operation temperature range | -40 to +85 |
| Storage Temperature | -50 to +90 |
| Reaction Wheel (RW 2000) | ||
 |
 |
|
| Angular Momentum | 0.35 N.m.s |
| Nominal Rotation Speed | 6000 rpm |
| Max. Rotation Speed | 7500 rpm |
| Nominal Torque | 0.012 N.m |
| Mechanical | |
| Mass | 0.8 kg |
| Dimension | Ф100*62m |
| Moment of Inertia | 4*10^(-4)kgm² |
| Mechanical Power | 18 W |
| Electrical | |
| Voltage | 18-24V |
| Type of plug | Micro-D 15 Female |
| Data Interfaces | RS 485 with ASCII or Binary Protocol |
| Power Consumption | |
| Stand By | 1.1W |
| Max Torque | 22W |
| General | |
| Operation temperature range | -20 to +50 |
| Storage Temperature | -30 to +60 |
| Reaction Wheel (RW 2200) | ||
 |
 |
|
| Angular Momentum | 5.5*10^(-4) N.m.s |
| Nominal Rotation Speed | 8000 rpm |
| Max. Rotation Speed | 16000 rpm |
| Nominal Torque | 22*10-10 N.m |
| Mechanical | |
| Mass | 0.4 kg |
| Dimension | Ф50*35m |
| Moment of Inertia | 700gmm² |
| Mechanical Power | 0.65 W |
| Electrical | |
| Voltage | 12V |
| Type of plug | Micro-D 15 Female |
| Data Interfaces | RS 485 with ASCII or Binary Protocol |
| Power Consumption | |
| Stand By | 0.5W |
| Max Torque | 0.75W |
| General | |
| Operation temperature range | -20 to +50 |
| Storage Temperature | -30 to +60 |